
Miembros VIP
Clasificación de curitas de robots paralelos
[categoría a la que pertenece]: aplicación funcional [características del producto]: casos de aplicación de robots paralelos en el enlace de clasifica
Detalles del producto
Exposición de productos
Ruiyi Intelligent - proveedor de soluciones integrales para equipos de automatización industrial y fabricación inteligente


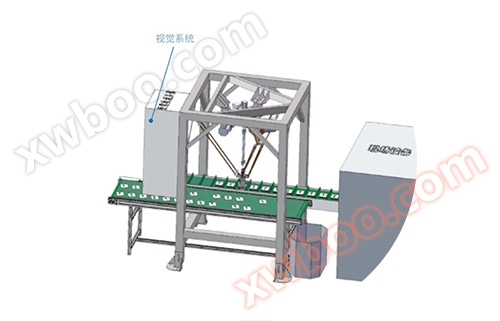
En una línea de producción, por3Cuatro trabajadores completaron la colocación de curitas en la cinta transportadora en el tanque de materiales y completaron el conteo al mismo tiempo. Los clientes esperan poner en funcionamiento robots en esta línea de producción para resolver los problemas existentes.Higiene deficiente, conteo incorrecto, ineficienciaEsperar a los problemas y aumentar la velocidad a120 - 180pieza/.minuto.

La tirita se envía al sistema visual a través de una cinta transportadora para el reconocimiento de la posición y la postura, y el robot absorbe la información de la posición y la postura a su vez.5La placa, después de ajustar el ángulo, se coloca en el tanque vacío, el equipo de detección fotoeléctrica en el tanque detecta si el número de curitas en el tanque cumple con los requisitos, si el número es correcto, se transmite a la siguiente estación de trabajo para la caja, si el número es incorrecto, se eliminará la línea de producción y se fluirá a la Caja de reciclaje para cooperar con diferentes ejecutores finales, de acuerdo con los diferentes requisitos de capacidad, el robot puede completar.Recogida y colocación de una sola pieza、Recoger varias veces seguidas para una sola colocaciónY otros requisitos de proceso diferentes.

| Resultados posteriores a la implementación | datos |
| Reducir la mano de obra | 3 personas |
| Crecimiento de la eficiencia | 75% |
| Ritmo de producción | > 120 / min |
| Tasa de no conformidad | 0% |
| Superficie ocupada | 7㎡ |
| Período de recuperación de la inversión | 2 años |

Esta aplicación se puede utilizar ampliamente enMedicina, alimentos,3CElectrónica, necesidades diariasY otras industrias.Nanjing ruiyi INTELLIGENT TECHNOLOGY co., Ltd. se puede adaptar a las necesidades de los clientes.

| Nanjing ruiyi INTELLIGENT TECHNOLOGY co., Ltd. |
| Dirección: No. 28 fengshou road, Dongshan industrial concentration area, jiangning, Nanjing |
| Teléfono: |
| Fax: |
| Por favor, Póngase en contacto con la cooperación comercial. | |||
|
Escanee y agregue Wechat
|
||

Anterior:Selección de juntas metálicas para robots de clasificación
Consulta en línea
-
Contactos
-
Empresa
-
Teléfono
-
Correo electrónico
-
Wechat
-
Código de verificación
-
Contenido del mensaje
-